 ChengDanguo
ChengDanguo—引言—
—introduction—
WHY SHOULD USE FOC IN YOUR ROBOT?
为什么要将FOC引入机器人系统中?
WHAT ADVANTAGES CAN FOC PROVIDE?
FOC能够带来什么样的优势?
WHAT KIND OF APPLICATION CAN FOC USE?
FOC能够满足什么样的应用需求?
Strictly speaking, the algorithm implementation of FOC is more complex than that of PWM,but FOC can still provide excellent torque control for BLDC at low speeds. In addition,Its speed switching is very smooth in high speed and low speed. Meanwhile, this also makes the operation of the DC brushless motor controlled by FOC quieter.
严格来说,FOC的算法复杂度远超PWM控制,但FOC能够为无刷电机在低速运动时带来提供极致的转矩控制能力,其无论在低速还是高速工作下的转换非常丝滑,此外,相比PWM驱动的无刷电机,其噪音得到了明显的抑制。
Therefore, FOC control has naturally become the preferred solution for advanced robot control, making direct drive, collaboration, and protection easier.
因此,FOC控制自然成为了机器人先进控制的重要解决方案,它使直驱、协同、保护更容易。
The following figure shows the typical application of FOC in the field of robotics:
下图展示了FOC在机器人领域的诸多应用场景:

DJI reduces drone noise and improves dynamic performance during high-speed flight through FOC.
大疆通过FOC提高了无人机的动态性能以及静音性。
FOC has been preliminarily applied to four-wheel independent drive of AGV.
FOC被广泛应用于四轮驱动的AGV小车中。
The dynamic response and the collaborative ability make quadruped can run flexibly
得益于FOC的动态性能以及多电机协同控制能力,四足机器人能够流畅的奔跑
FOC provides gentle torque feedback and motion protection, making exoskeletons safer
FOC提供了更柔和的力矩反馈以及运动保护,使得外骨骼更加安全
However, existing open-source FOC controllers generally have the following defects:
然而,现有的开源FOC控制器普遍存在以下问题:
1. Insufficient integration: Mainstream FOC schemes such as simpleFOC or Odrive mostly only support fewer parallel FOC outputs. For applications such as AGV, AUV, or quadruped robots, multiple FOC controllers need to be connected in parallel, and reliability still needs to be improved
1.集成度较为不足:诸如simpleFOC或Odrive等主流的FOC控制器,仅支持较少的并行FOC输出,针对AGV、AUV或四足等动辄四个电机甚至更多电机的应用场合,需要通过多个控制器并行连接,可靠性有待提高。
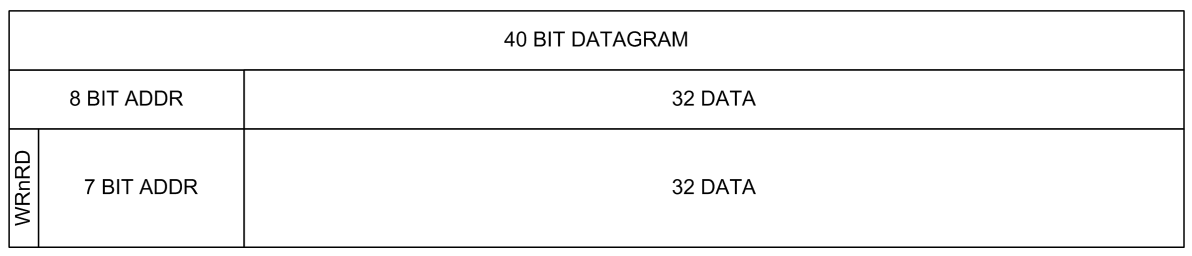
2. Poor execution efficiency: The mainstream FOC solutions are implemented through software algorithms, but the Park transform...Read more »


 Zdenek Hurak
Zdenek Hurak
 Implemented Robotics
Implemented Robotics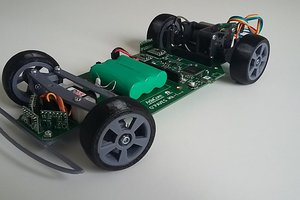
 AdaCore
AdaCore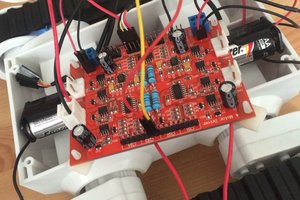
 fbrktr
fbrktr
关于这个项目的一些八卦2023/8/9
Some gossip about this project on 2023/8/9:
1. 这个项目似乎有点起色了,时不时的线上或线下交流也让我感到惊喜,这个项目能够迸发出更多的价值,真的让人高兴,或许我应该通过某种方式对合作者或者经常交流的开发者表示感谢,关于此如果你有什么建议,请告诉我!
This project seems to be a little better, from time to time online or offline communication also surprised me, this project can burst out more value, really happy, maybe I should somehow thank the collaborators or developers who communicate frequently, if you have any suggestions for this, please let me know!
2. 最近确实比较忙,自己的项目,申请博士生资格,经济问题还有自己结婚的事情,确实比我想象中的要艰难的多,但是不管怎么说,终归还是有些有些起色的,老话怎么说的,"生活还要继续"么,对吧(笑)
I've been really busy lately, my own projects, applying for doctoral qualifications, financial problems, and getting married by myself, it's indeed much more difficult than I thought, but anyway, the final return is a little better, how the old saying goes:"life goes on", right?
3.师弟跟我说,这玩意是挺厉害,但是看着没有高级感,我问他怎么才看着高级,他回答我三要素:闪瞎眼的彩色LED,不知所云的显示屏……以及更密的布局和走线,我觉得也许是应该在板子上加个LED或者显示屏啥的(不是开玩笑)
Junior bro told me that this thing is quite powerful, but there is no sense of seniority in the look, I asked him how to look advanced, he answered me three elements: blinding color LED, unknown display... As well as denser layout and routing, I think maybe an LED or display should be added to the board or something (not a joke)