 Doan Hong Trung
Doan Hong TrungDelta X S is a type of delta robot arm, designed with a unique geometric shape resembling a spider. It is known for its agility and flexibility.

The Delta X project currently has three models: Delta X 1, Delta X 2, and Delta X S. We are planning to introduce a larger delta robot model next year, similar to iPhone name: Delta X Pro.
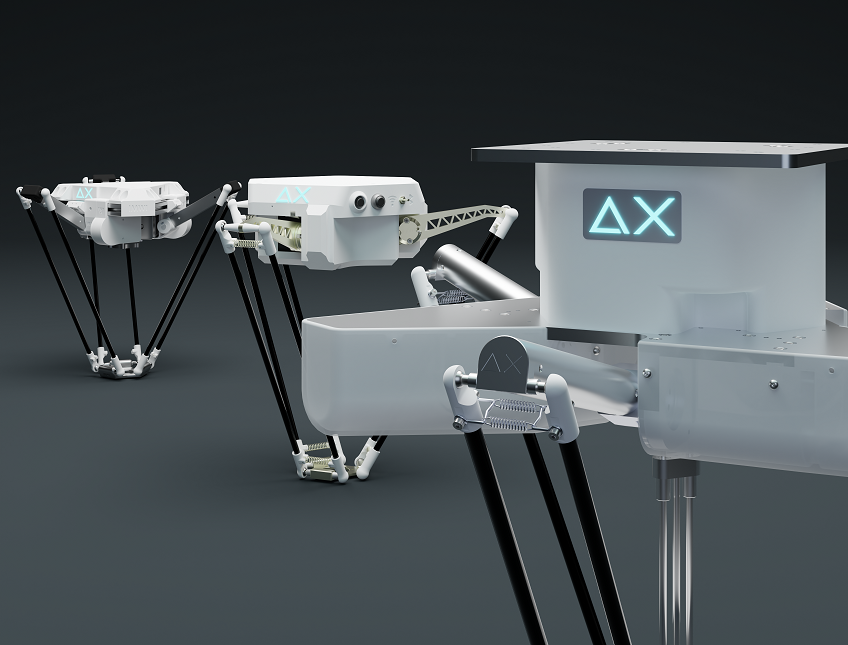
Over the past 3 years, Delta X S has gone through 6 prototype versions.

What can Delta X S do?
As a robotic arm, Delta X S is capable of almost every operation that a human typically performs. However, with its characteristic of handling lightweight items swiftly within a 3D space with height restrictions, Delta X S excels best in typical pick & place applications that most delta robots on the market perform. Below are some examples of Delta X S's applications. You can infer similar applications:
Pick & Place
Water Dispensing
Weed Control
Assembly
Drawing
Solving Rubik
How to use
Basically, the output of the robot is the position it moves to. So its input would be information about position and speed. You simply need to connect your computer to the robot via a USB cable and send G-code commands to it. There are many ways to control the robot. We will update the details in the coming days.
Specifications
There are 3 standard sizes that can be customized and expanded up to 6 degrees of freedom
| Working space | D = 400/600/800 mm H = 200 - 300 mm |
| Max payload | 2 kg |
| Max speed | 3 m/s |
| Max acceleration | 50 m/s2 |
| Repetition Accuracy | ±0.15 mm |
| Positioning Accuracy | 0.2 mm |
| DOF | 3/4/5/6 |
| Power | 24VDC - 30A |
| Mass | 25 kg |
Currently, Delta X S is not open source, but all projects utilizing Delta X S will be open source.
Large projects like the pick & place system, Delta X S Rover (weed-killing robot), AI-based waste sorting system, quadruped dog robot using Delta X S arms, and 3D printing of construction materials with Delta X S, ... will be developed for the community.
Additionally, small projects such as designing various grippers and useful mechanisms with low-cost and easy-to-build features will also be open-source.
The mechanical open-source designs will be updated on Grabcad: https://grabcad.com/delta.x.robot-1
Codes will be hosted on GitHub: https://github.com/deltaxrobot
Tutorial videos will be available on the Delta X Robot YouTube channel: https://www.youtube.com/@DeltaXRobot/videos
We are currently in need of funding to continue the project and greatly appreciate your support.
Pre-order Delta X S Official with 40% discount
Delta X Team
 augustinejinu
augustinejinu
 davedarko
davedarko
 Maksim Surguy
Maksim Surguy
 Roger Cobra
Roger Cobra