 Anton Khrustalev
Anton KhrustalevIn March 2022, while working on a laboratory robot designed for handling test tubes, the idea of using a closed-loop driver came up. This driver needed to be:
- Compact
- Feature minimalistic wiring
- Offer precise and repetitive positioning
- Exhibit unwavering reliability
Sadly, no existing solutions fit the bill. Some were inadequate due to size, others lacked the necessary features or interfaces, some had proprietary code that disallowed modifications, and still, others were either unavailable due to component shortages or had been discontinued. A detailed comparison of these alternatives can be found here.
Thus, a new vision was formed: To create a universal, powerful, and affordable driver that would address all challenges related to controlling a stepper motor.
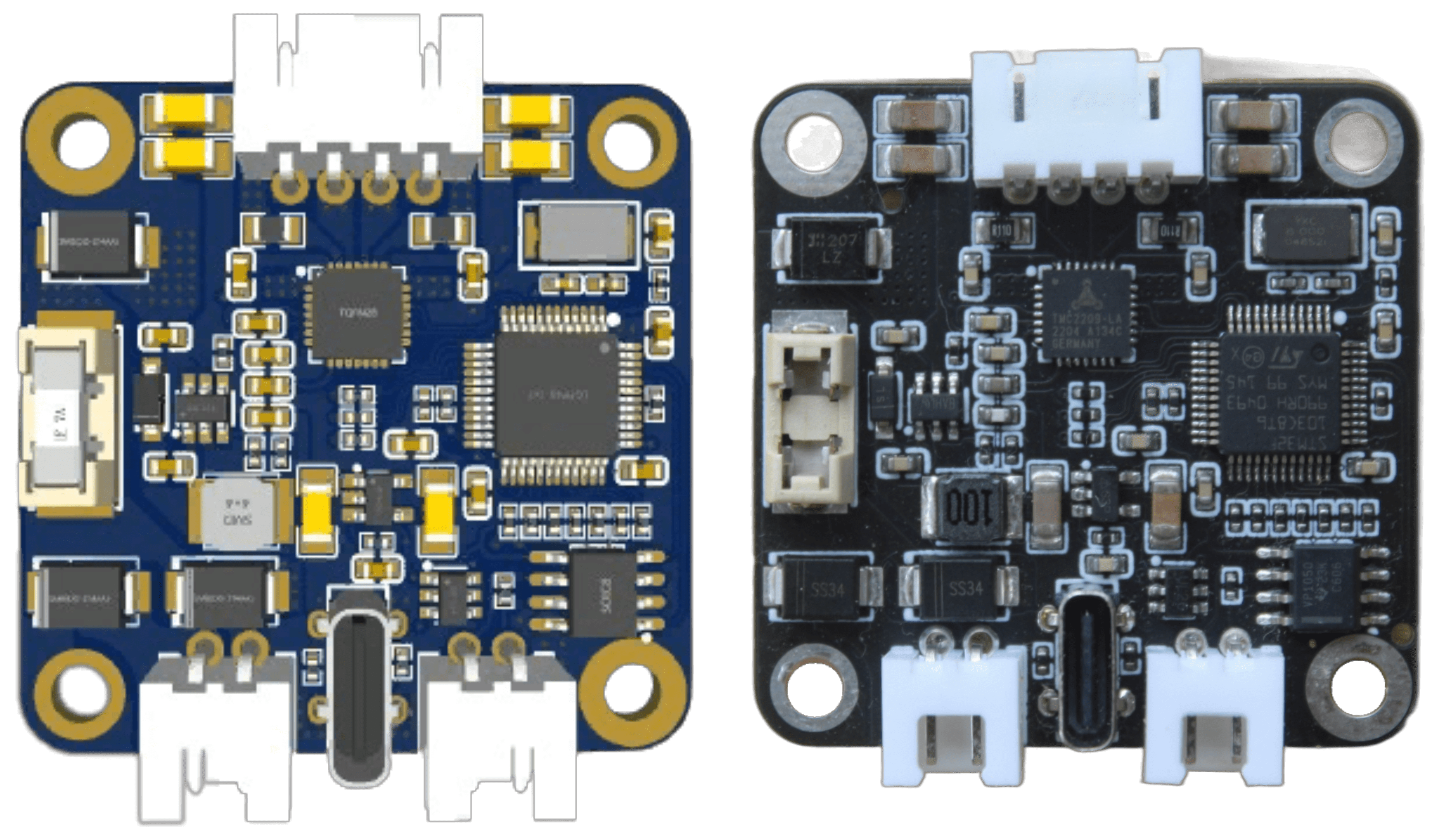
By September 2022, the first prototype driver was born. Key components included:
- Standard CAN-Bus and USB2.0 with QC support
- STM32F103 MCU
- TLE5012B encoder
- TMC2209 stepper motor driver
However, there were critical setbacks. While it did feature a Type-C port, it relied on Quick Charge (QC) for power, which hampered its flexibility. Another significant limitation was that the controller could not operate the USB and CAN-Bus simultaneously, leading to developmental troubles. A few minor problems arose but were quickly fixed with a soldering iron.
Predictably, this prototype did not achieve all its intended functions, underscoring the need for a revised driver version. This initial setback only strengthened the determination to design a comprehensive stepper motor control solution.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.