0%
0%
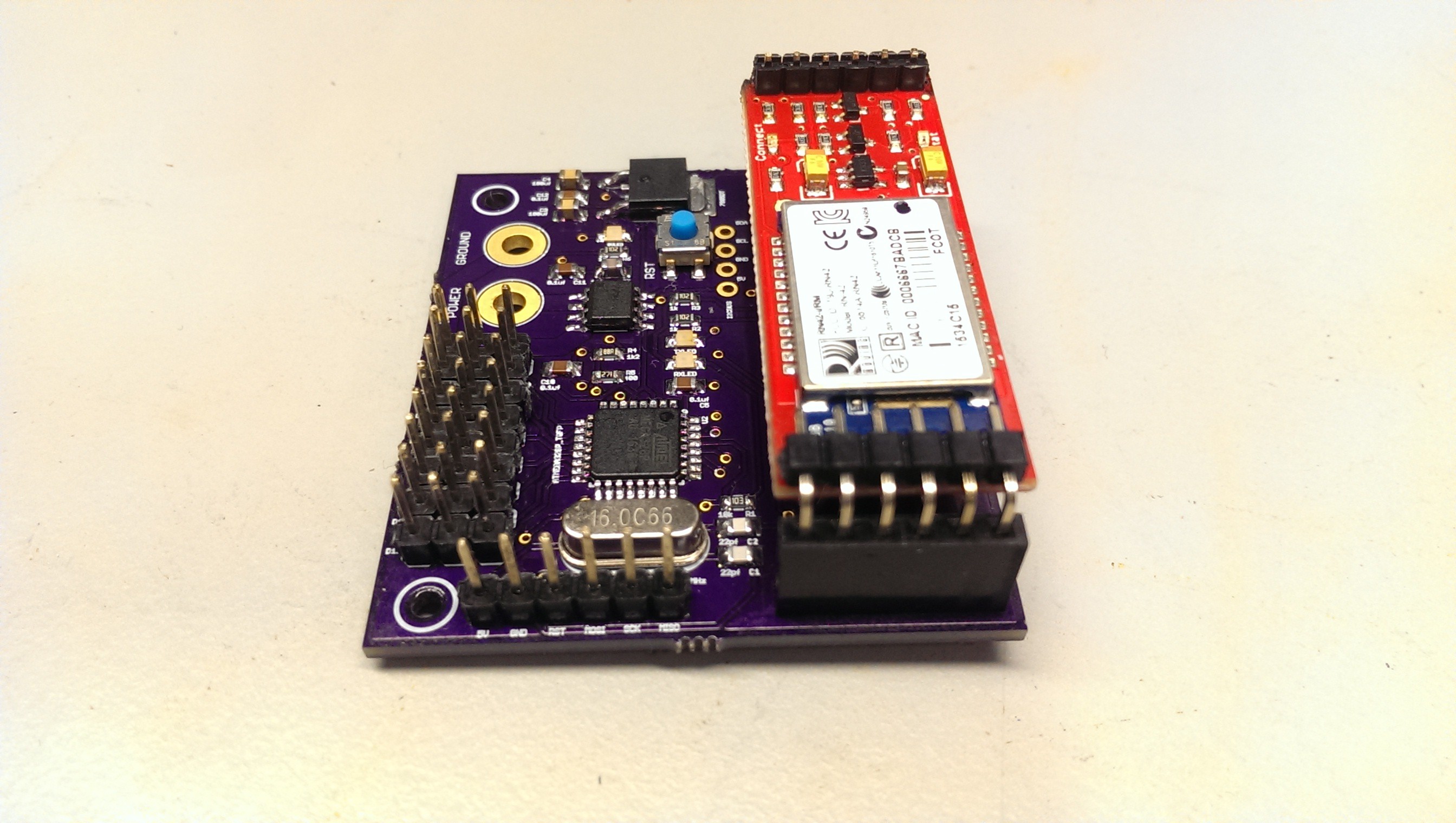
Mr. Runner
Creating a four legged robot with a running bound gait.
 Alex Martin
Alex MartinBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 Andrew Retallack
Andrew Retallack
 DIY GUY Chris
DIY GUY Chris
 Steve Smith
Steve Smith
 Sander van de Bor
Sander van de Bor
coo!! Can't wait to see your progress!