0%
0%
Open Robotics Eurobot
Open Source competition robot development. You will never be alone for your contest again!
 Raphaël Casimir
Raphaël CasimirBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
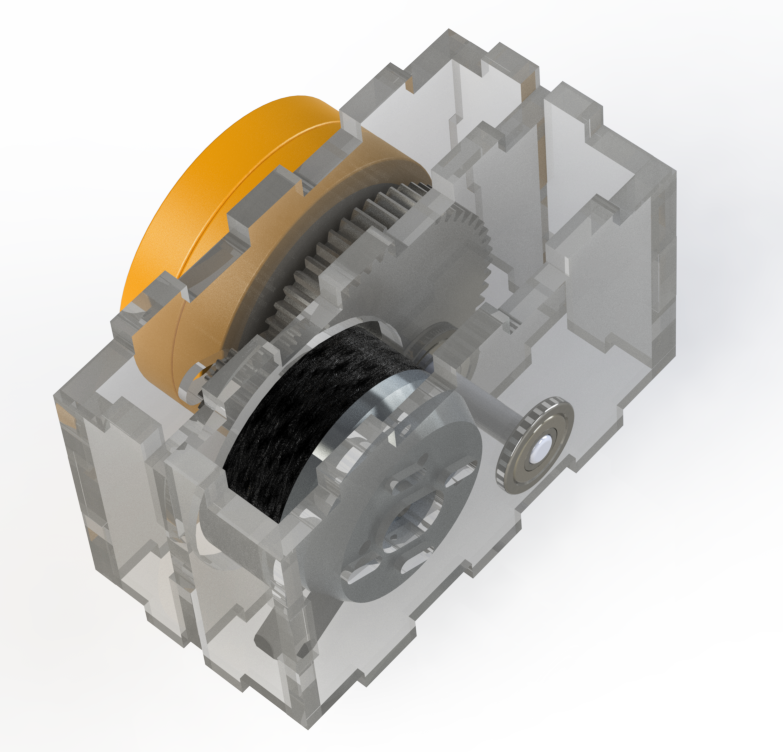
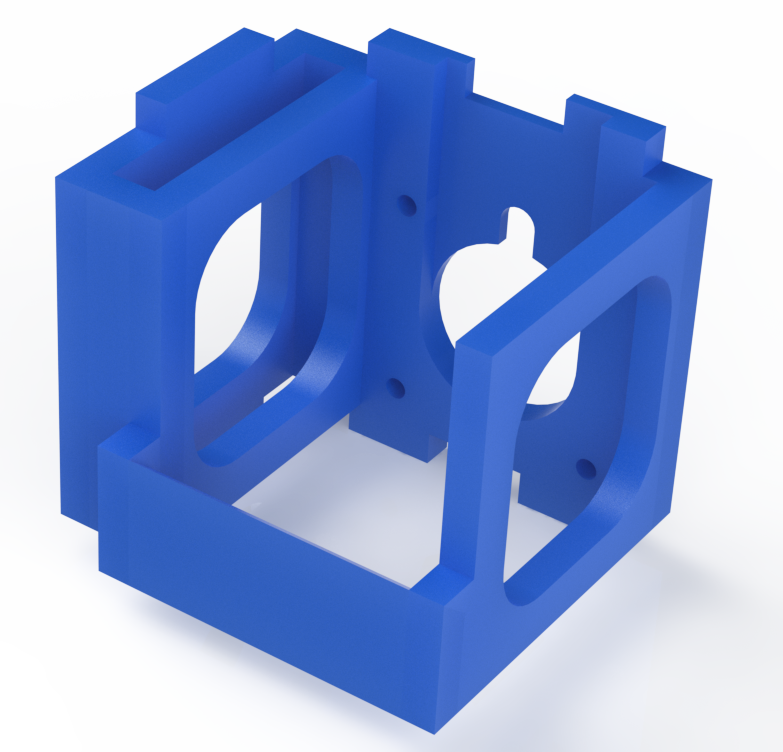


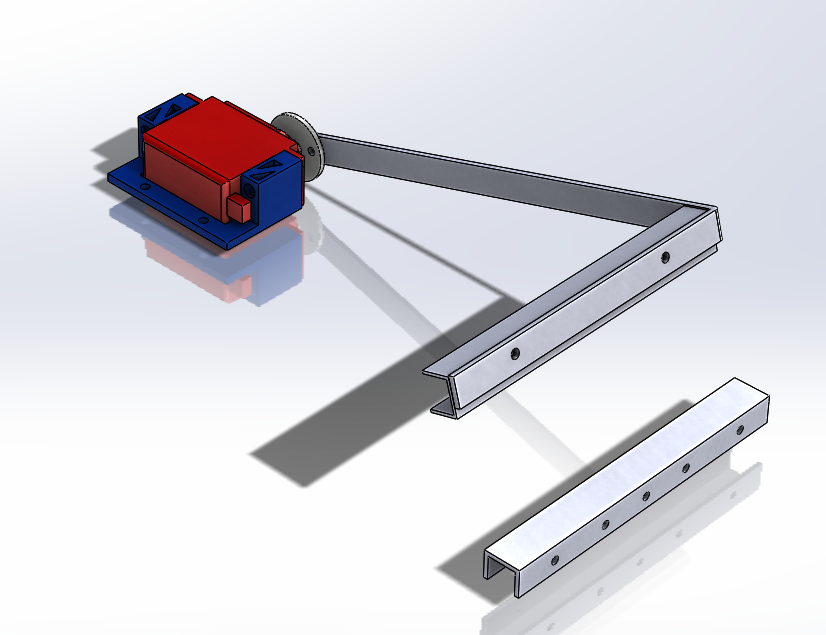
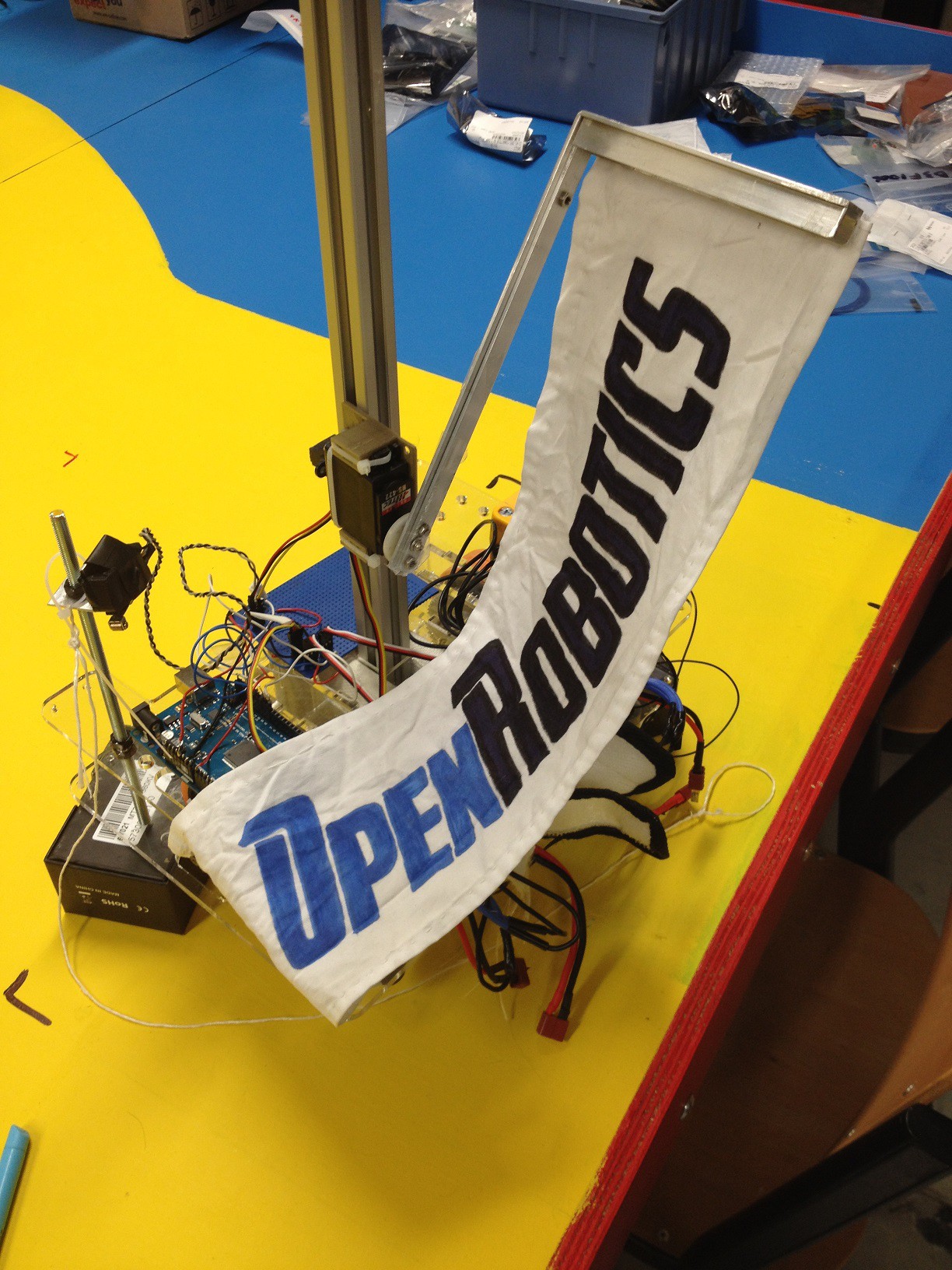
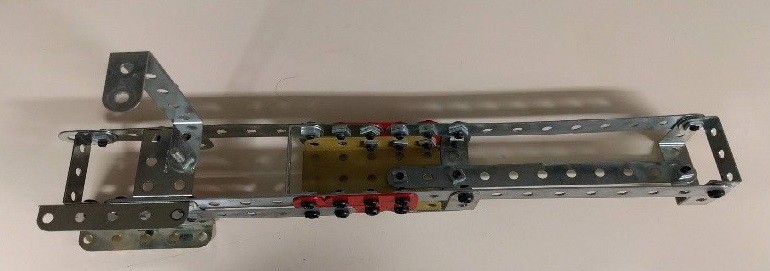
 The mechanism is very simple, the blue part is fixed on the robot and the bar in U is fixed apart. Then we hang together the two metal bar with a piece of fabric. On the right there is the support for the servo, which we designed to be reusable for other tasks.
The mechanism is very simple, the blue part is fixed on the robot and the bar in U is fixed apart. Then we hang together the two metal bar with a piece of fabric. On the right there is the support for the servo, which we designed to be reusable for other tasks.





 EK
EK
 Petar Crnjak
Petar Crnjak

 Joshua Elsdon
Joshua Elsdon
Robotics are one of the most emerging field in this era. As we all know every field is going toward automation, Robotics play an important part in it. we are going from Manual work to automation with Robotics.
https://techlarapoint.com/