 Yuta Suito
Yuta SuitoHow dose it work.
Roktrack heads to the pylon recognized based on camera image. When it approaches the pylon more than a certain amount, it turns around and searches fot next one. By speeding up the turning timing with each lap, it will enter from the outside to the inside. A custom model trained on pylon images in yolov8 is used for recognition. Object detection shows the height of the pylon. By determining how high to approach, the turning timing is adjusted.



Blades
It is equipped with two blades. This allows pebbles to be ejected backward when they hit the blades, making the blades more durable. The upward-facing nylon cord prevents weed from tangling around the motor shaft.
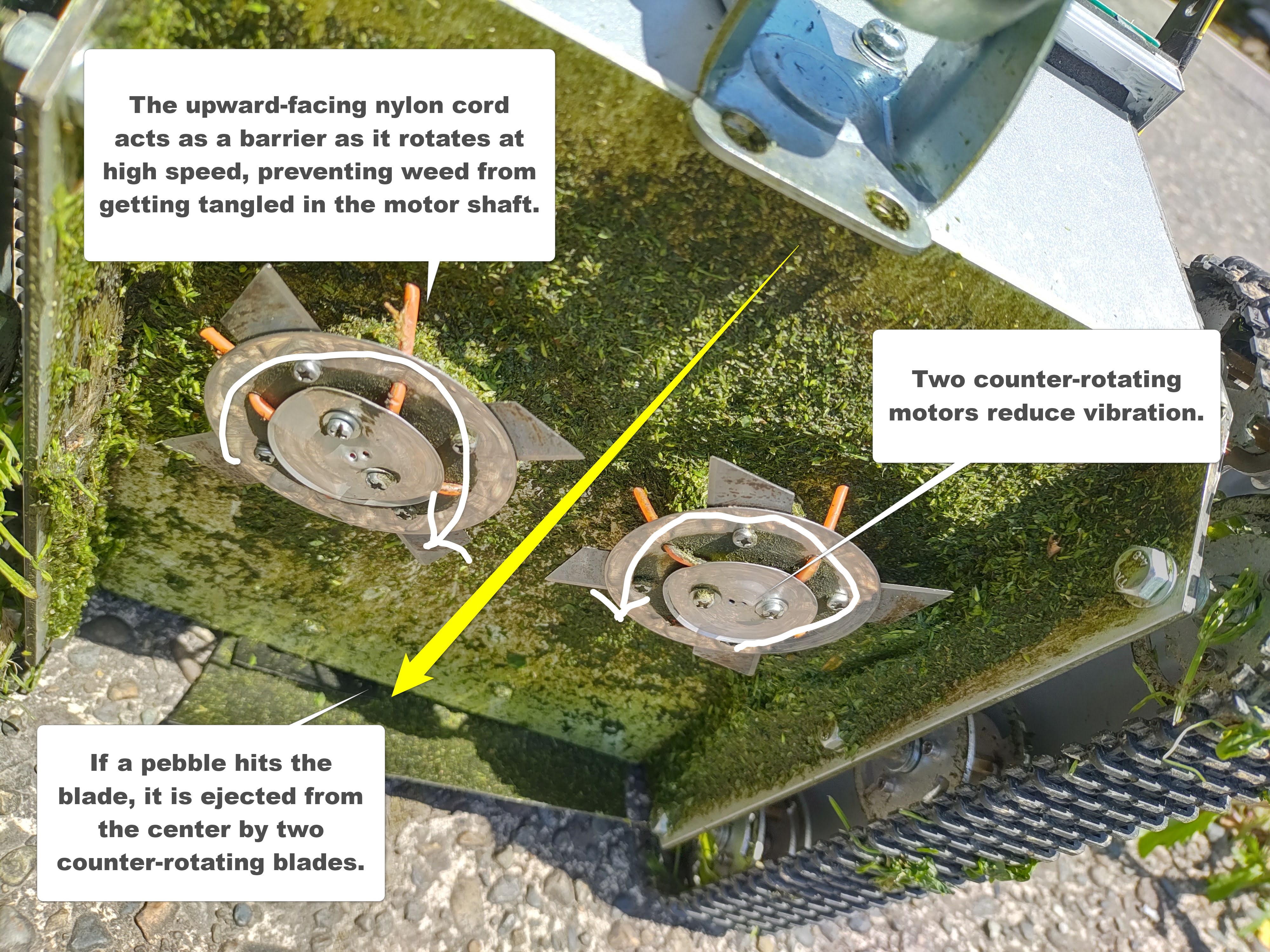
With a single blade, the blade must be enlarged to the limit of the body's width in order to provide as much cutting width as possible. Then, in an environment where there are pebbles, the pebbles will get caught between the blade and the body. This would be a disaster, the fuse would blow in an instant, and the blade would be very badly damaged. It took more than 30 fuses and dozens of blades to achieve this shape. Now the grass is not tangled at all and the blades function for dozens of hours. This shape of blade allows mowing of weeds and grass up to 15 cm.
Rough Terrain
Eccentric tires on the outside of the sprockets allow the machine to overcome bumps of up to 5 cm. No additional actuator is required as the tire is directly attached to the sprocket.

Exterior


Interior

The motor for mowing is controlled by a relay and turns only in a single direction. In the process of prototyping, I found that it is difficult to prevent weed from wrapping around by rotating the motor in the opposite direction. It would be very costly to reverse the motor and stop it at just the right moment when it starts to get entangled. So, as mentioned above, I prevent the weed from getting entangled by devising the shape of the blade.
Best pylon color
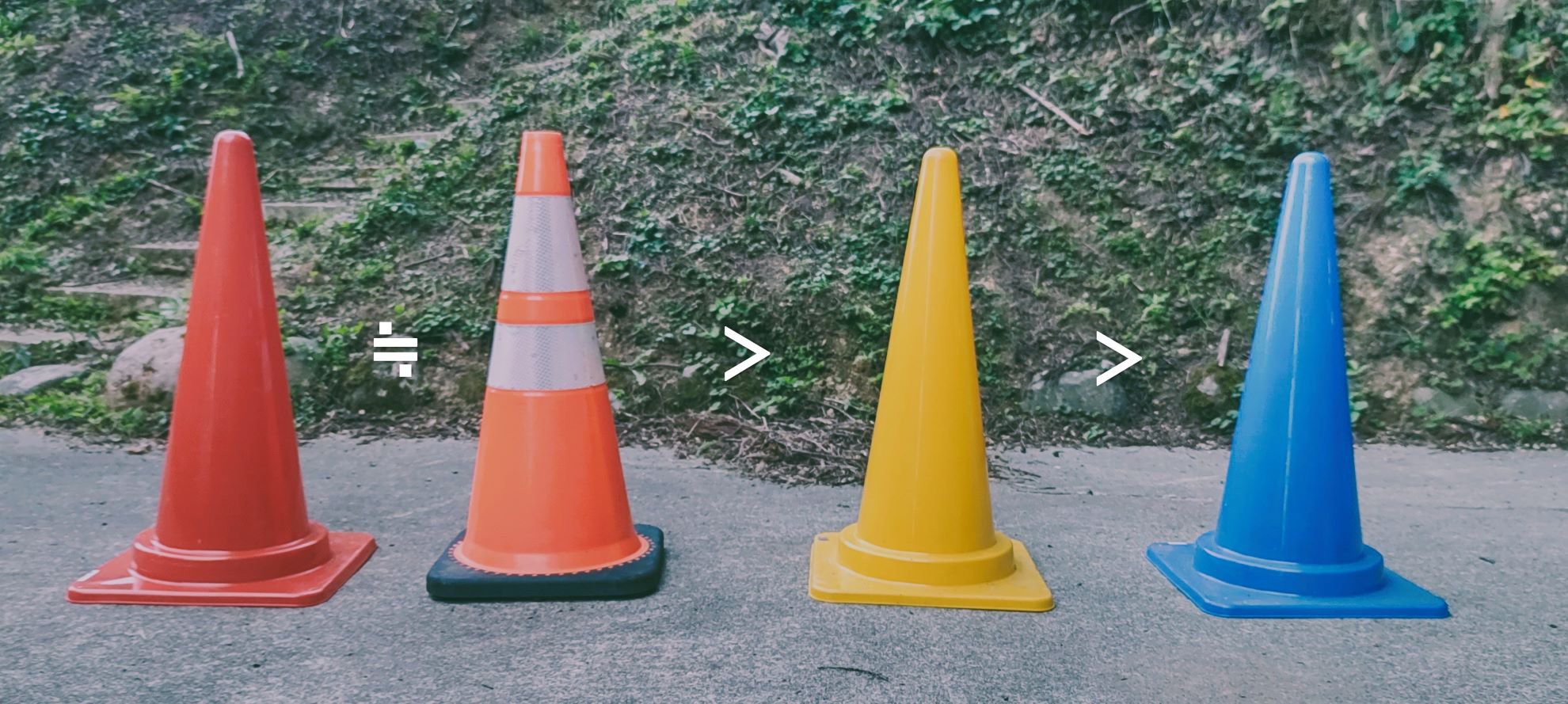
The color of the pylon, which has a high recognition rate and can be detected from a distance, is red. Blue and green are more common in nature, so the recognition rate of blue and green is low.
Spec
| Weight | 5~7kg |
| Battery | Lifepo4 4S 12.8V |
| Pylon Recognizable Distance | 15~30m |
| Maximum working area | 20m * 20m |
| Working hours per charge | 2~3 hours |
| Mowing width | 20cm |
| Speed | 1 km/h |
| Raw Material Cost | $330 |
| Recognizable Object | Pylon, Person, Roktrack, Digit, Animals |
Solar Power
Roktrack can also be recharged by solar panels, and if the weather is clear, it will continue to mow the weed automatically for about 15 minutes a day, permanently.
The solar panels generate 4W each at an open circuit voltage of 22V according to the data sheet. In reality, they generate about half that amount. Charge and discharge management is done by an off-the-shelf solar charge controller. These controllers can be set for cutoff and return voltages. If I set the cutoff to 12.7V and the return voltage to 13.2V, the system runs for 10-15 minutes every day when the weather is nice. If the cutoff voltage is lowered and the reset voltage is increased, it can run for an hour once every few days. At first I was trying to properly calculate the amount of charge, etc., but the voltage drop caused by the mowing motor (RS775) was so severe that I gave up trying to calculate it accurately. I decided on a setting that would work to some degree each day by changing the cutoff and return voltage over several days.
Wiring Diagram
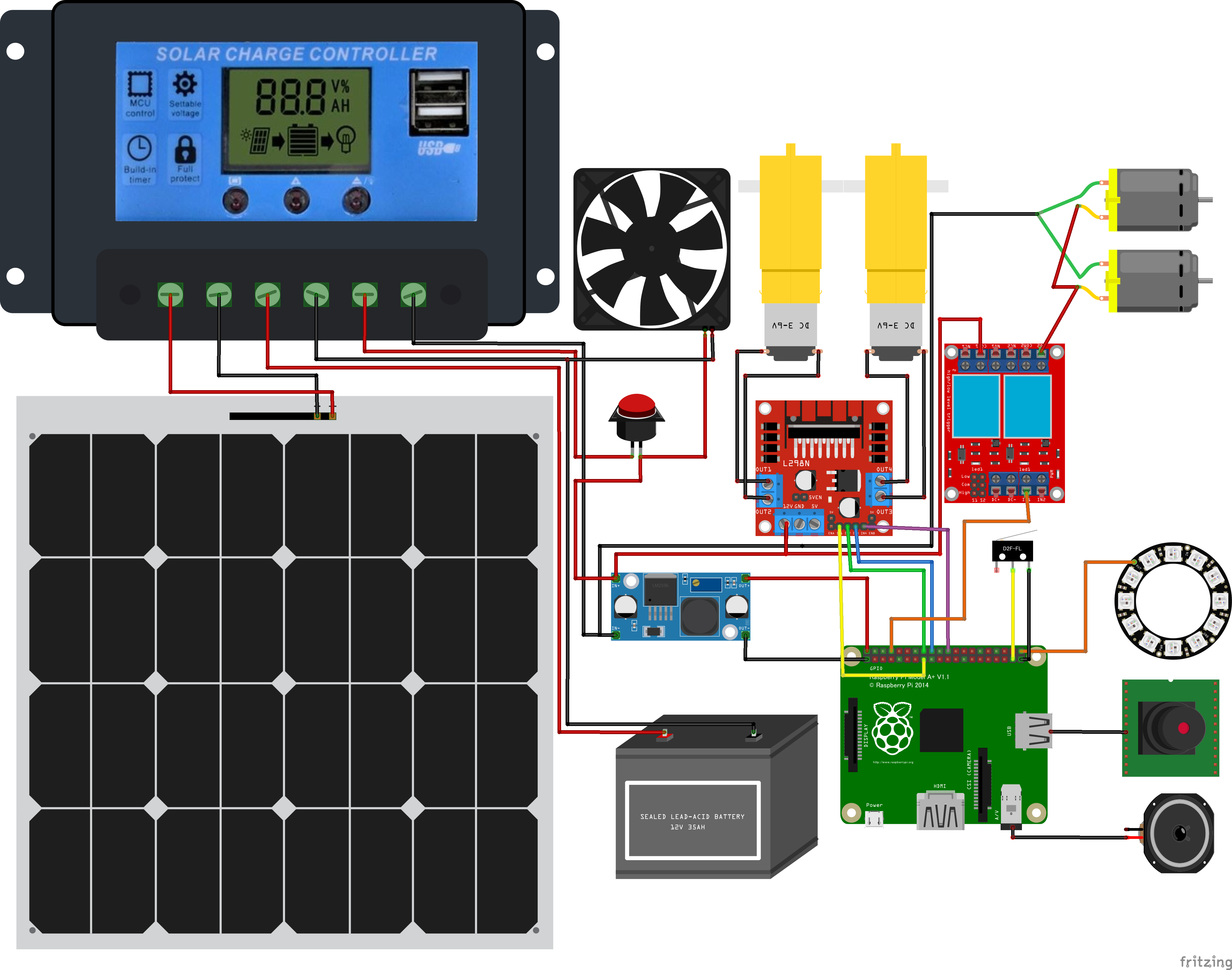
*Each component is an image and differs from the actual component used.
Multi Node
Steep Slope
If two units work together, they can handle slopes of up to 60 degrees simply by adding wires and pulleys.
Experiment video.
Control App
Basically, all you have to do is press the power button to start cutting the grass, but you can also control it remotely through an Android app. BLE Advertisement Broadcast is used to communicate between the robot and the app.
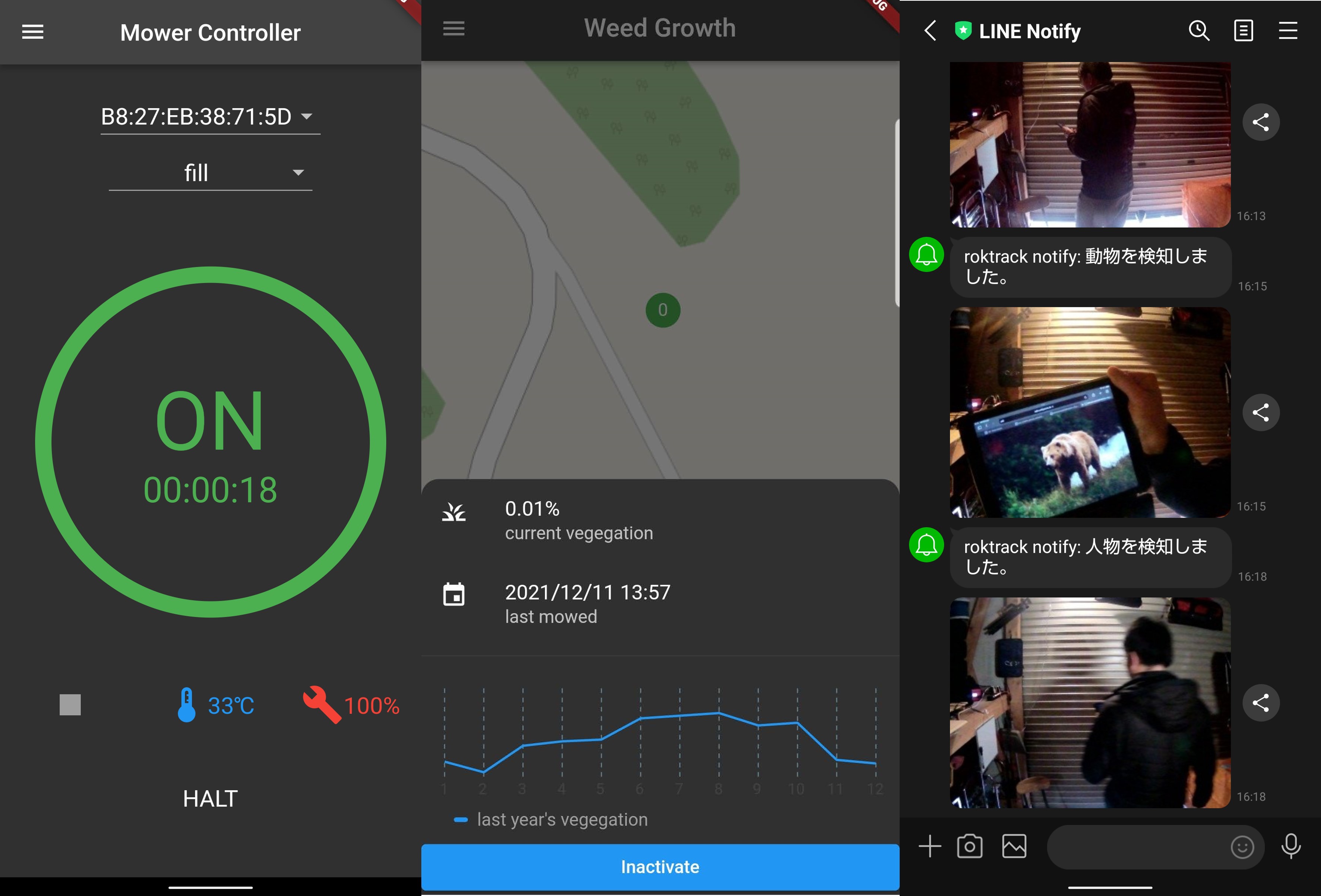
The app can record past mowing locations and observe current weed growth from Sentinel satellite images.